Advanced Visual Perception
Fundamental research in scene understanding, 3D reconstruction, and robust detection. We develop algorithms that can handle complex lighting, occlusions, and dynamic environments.
3D Reconstruction
Scene Graph
Object Detection

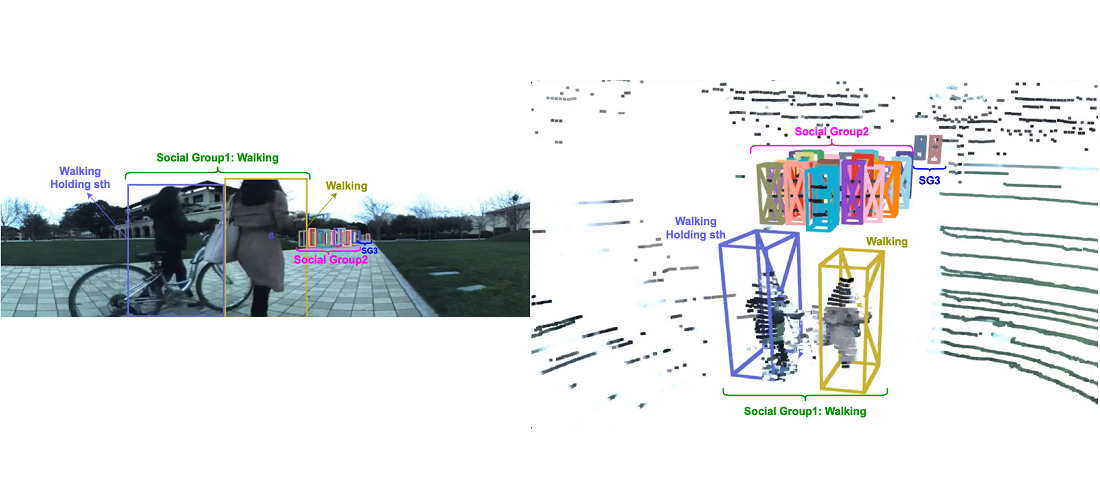
Forecasting & Behavior
Predicting human behavior and multi-modal trajectory forecasting. We focus on social and physical constraints to understand how humans move and interact in crowded spaces.
Trajectory Prediction
Social Metrics
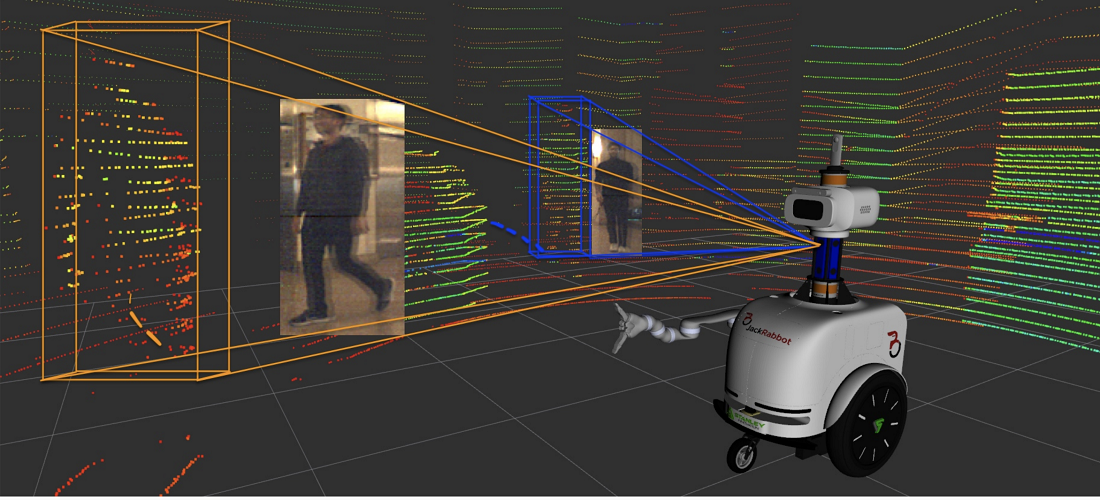
Embodied Intelligence & Navigation
Developing robotic systems capable of autonomous navigation and task planning. Our research integrates perception directly into the control loop for intelligent interaction.
Robot Navigation
Social Robotics